




RCXiVY2+ (RCX320 / RCX340)
Yamaha's own unique solution for integrated robot vision
 |
RCXiVY2+ (RCX320 / RCX340) Integrated Robot Vision System with -Supported controllers : RCX320・RCX340 |
Feature
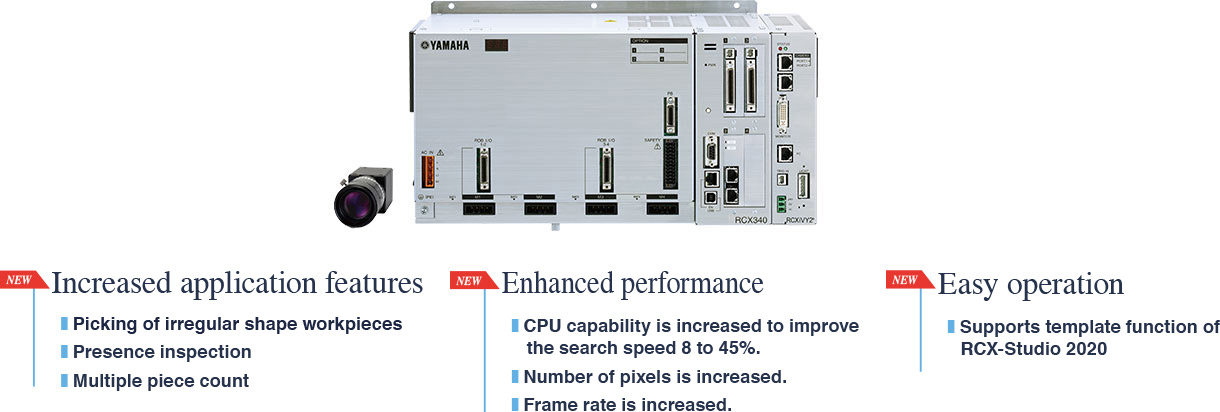
Advanced RCXiVY2+ has been launched.
 |
 |
 |

New Feature
1. High speed positioning of irregular shaped parts (foods or clothes) NEW
Blob search function
Suitable for pick & place or detection of parts with wide tolerance in shape and size, or high speed counting. Detection speed is 2 to 10 times faster that edge detection.
 |
 |
 |
2. Detection time is shortened up to 45%
|
By adopting a high-performance camera and improving the camera frame rate and CPU capability, detection time is reduced 8 to 45% while the resolution is improved.
|
 |
Comparison of search time
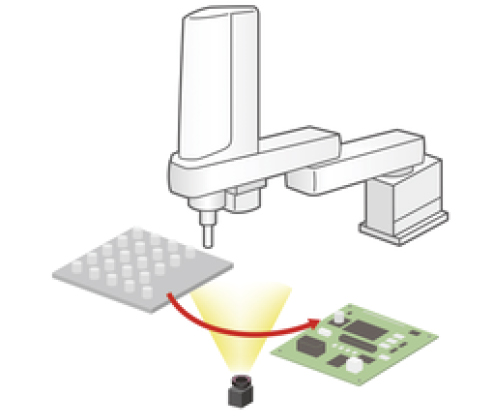
3. Suitable for parts detection and high volume parts count
Application examples*Subject to application and conditions.
-Detection of electronics components on PC board
-Detection of accessories in package
-Counting of the number of bottles in pallet
-Detection of food labels
-Detection of screws and washers that secure parts
-Checking drilled holes
-Counting of electronics components
4. Overlap can be eliminated.
Overlapped workpieces are recognized and they can be excluded from the search target.
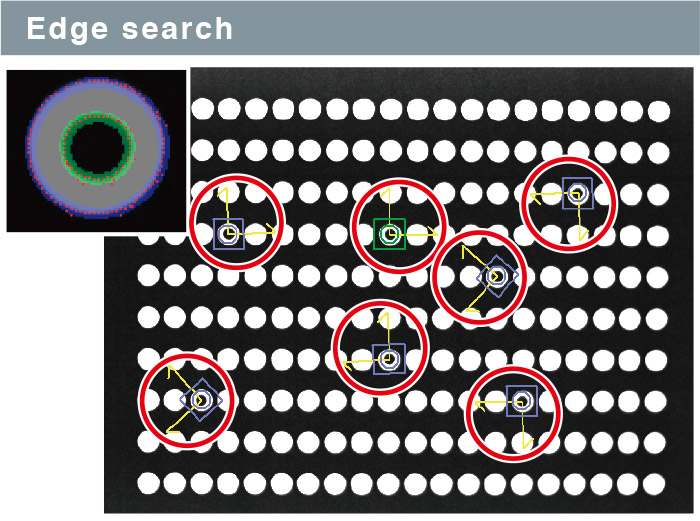
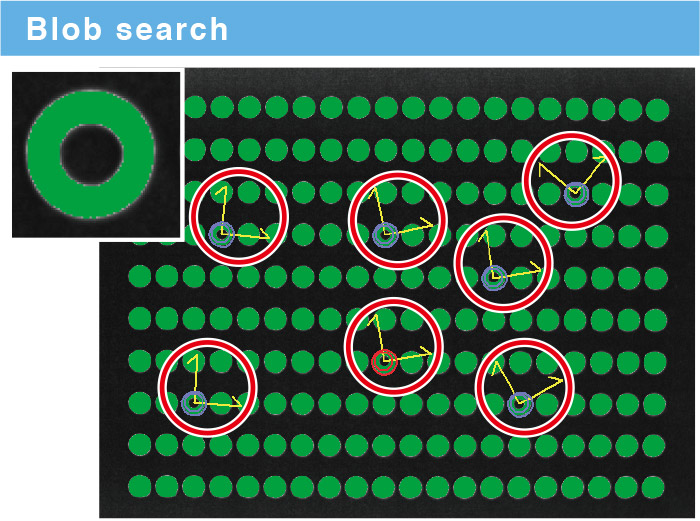
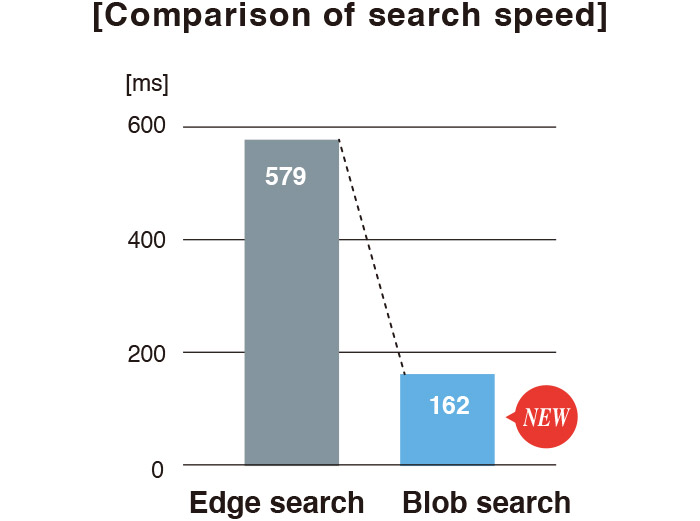
5. Detection with Speed
|
Comparing with edge search, blob search speed is 2 to 10 times faster.
|
 |
Comparison of edge search and blob search
*Only doughnut shape workpieces are detected.
 |
 |
 |
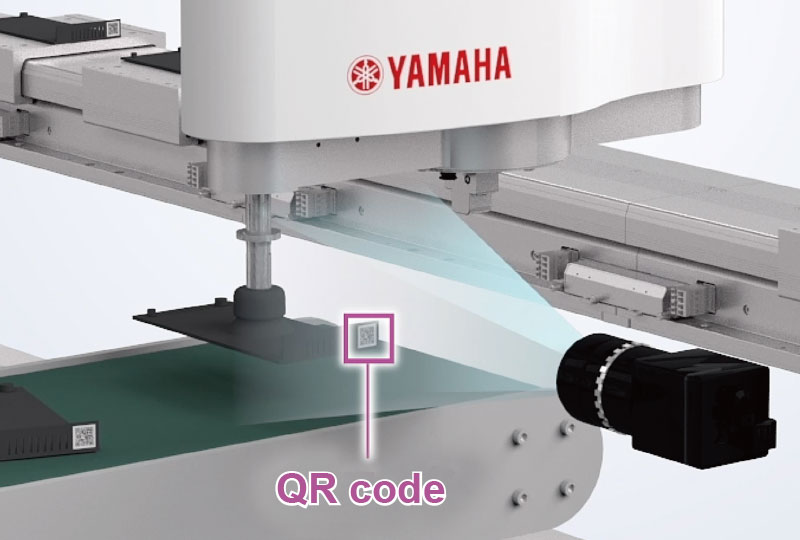
6. Code recognition function
|
Codes such as QR codes, data matrix codes, and barcodes can be recognized. -QR code -Data matrix code -Barcode (JAN/EAN-13 JAN/EAN-8 ITF NW7 CODE39 CODE128) * Up to 255 characters can be read. Only alphanumeric characters and symbols are supported. (2-byte characters such as HIRAGANA and KANJI characters cannot be read.) |
 |
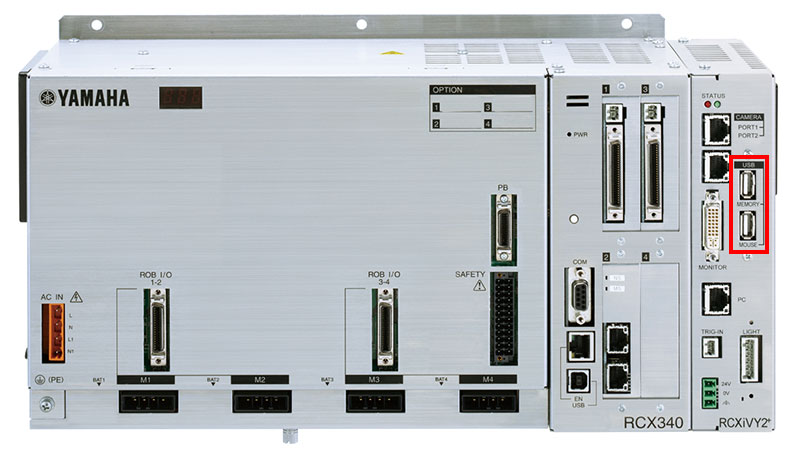
7. Automatic image save function/History image function NEW
Images are saved automatically and can be checked easily on an external monitor. These functions are very convenient when you want to check the captured images retrospectively during operation or debugging or save the images for traceability purposes.
Automatic image save function
Images can be saved to a USB memory automatically. An SSD or HDD that can be connected to a USB port can also be used.
| [Parameter] | |
| Image save mode | All images / NG images / Disabled |
| Image size | Full size / Reduced size (320 x 240 pix.) |
| Overwrite save | Disabled / Enabled (The images are deleted from the oldest image when enabled.) |
| [Number of images that can be saved] Number of images that can be saved when the memory size is 128 GB. |
||
| Number of camera pixels | Image size | Number of images that can be saved |
| 0.4 million pixels | 0.4 MB | 327680 |
| 1.6 million pixels | 1.6 MB | 81920 |
| 3.2 million pixels | 3.2 MB | 40960 |
| 5 million pixels | 5 MB | 26214 |
| Reduced Size | 0.08MB | 1638400 |
Number of images that can be saved = Memory size / Image size 81920 images can be saved by 1.6 million pixel camera when 128 GB memory is used. When the cycle time is 3 seconds, images for 68 hours can be saved.
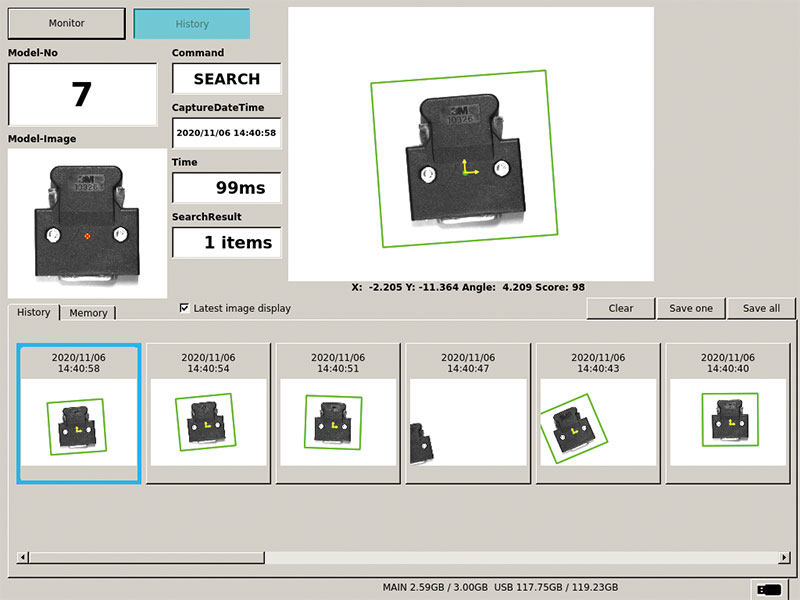
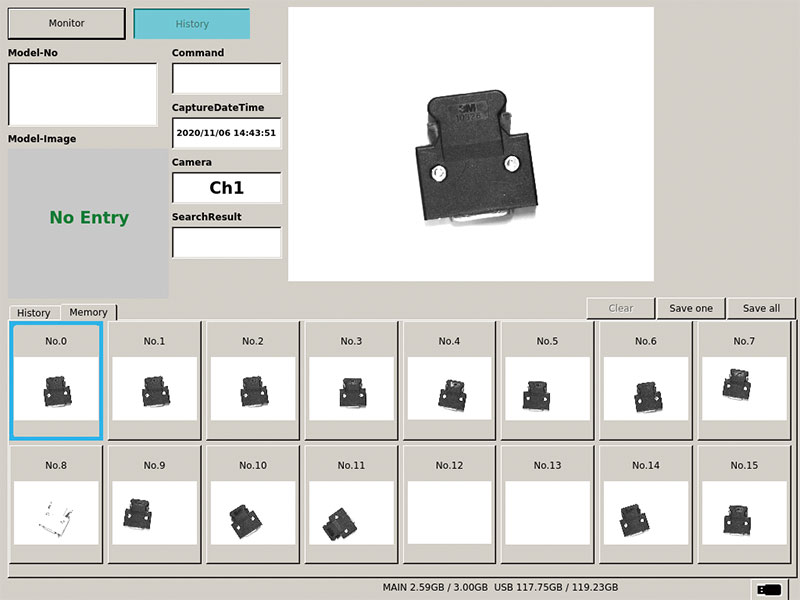
History image function
Images can be displayed on an external monitor during searching. The images and search results can be checked retrospectively with a USB mouse connected.
|
Past search images and results are checked.
|
Images in the memories (No. 0 to 15) are checked.
|
| [Number of images that can be saved] | ||
| Number of camera pixels | Image size | Number of images that can be saved |
| 0.4 million pixels | 0.4 MB | 1250 |
| 1.6 million pixels | 1.6 MB | 312 |
| 3.2 million pixels | 3.2 MB | 156 |
| 5 million pixels | 5 MB | 100 |
Area for history images 500 MB. Number of images that can be recorded to the history = 500 MB / Image size
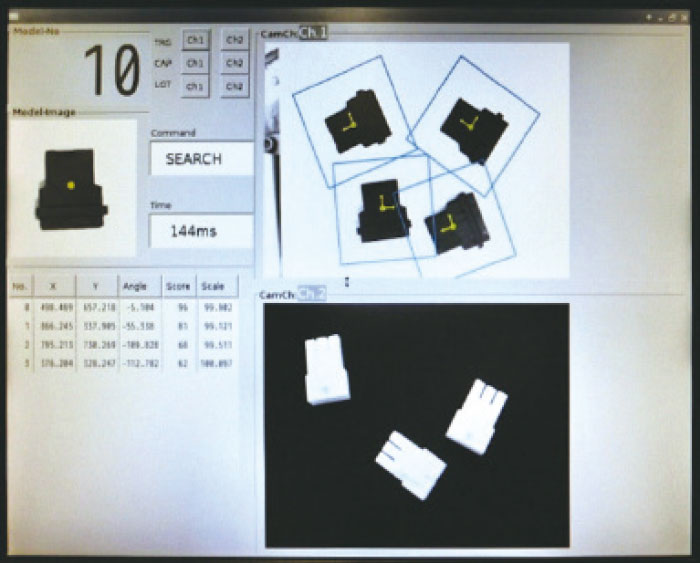
Connection of multiple cameras NEW
Up to eight cameras can be connected via HUB and support various applications such as addition of code recognition camera.
 |
[Application using three cameras]
|
Robot controller integrated type
It's easy to use because it's an integrated robot.
1. Robot controller integrated type
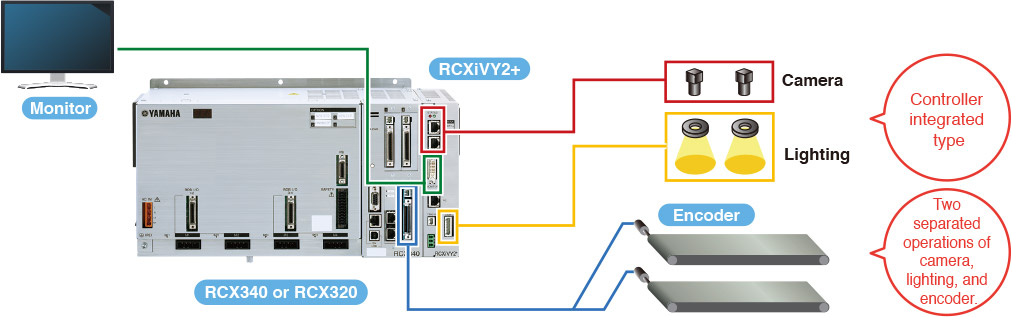
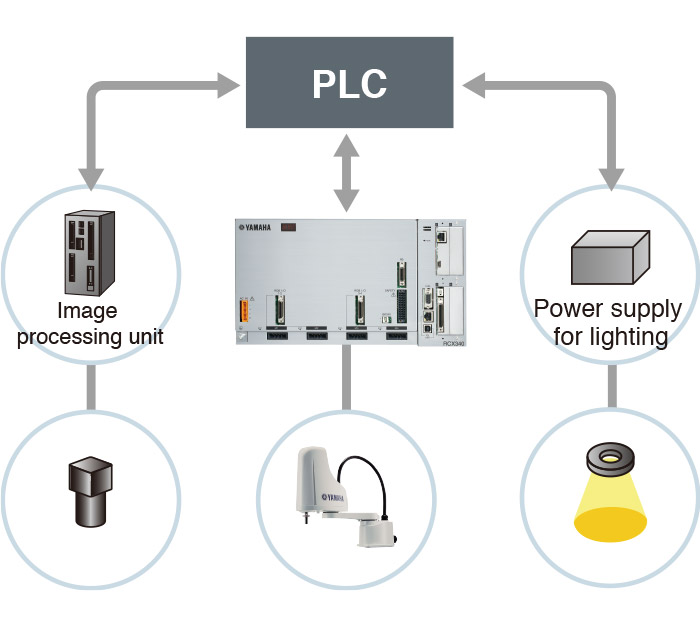
Typical Robot Vision setup
 |
|
 |
RCXiVY2+ system
 |
|
 |
 |
 |
2. Examples of program commands
[VSEARCH] Detect parts with designated camera
Camera and component type to be used for detection and the calibration data to be used can be switched with one command.
 |
 |
 |
[VGETPOS] Acquires the coordinates of the detected workpieces.
The search results can be substituted into the point coordinates directly.
 |
 |
[LVOLUME] Intensity of light is adjustable from 0 to 100% range
In detection mode intensity of light can be adjusted with one command. Detection can be repeated with adjusted intensity.
 |
 |
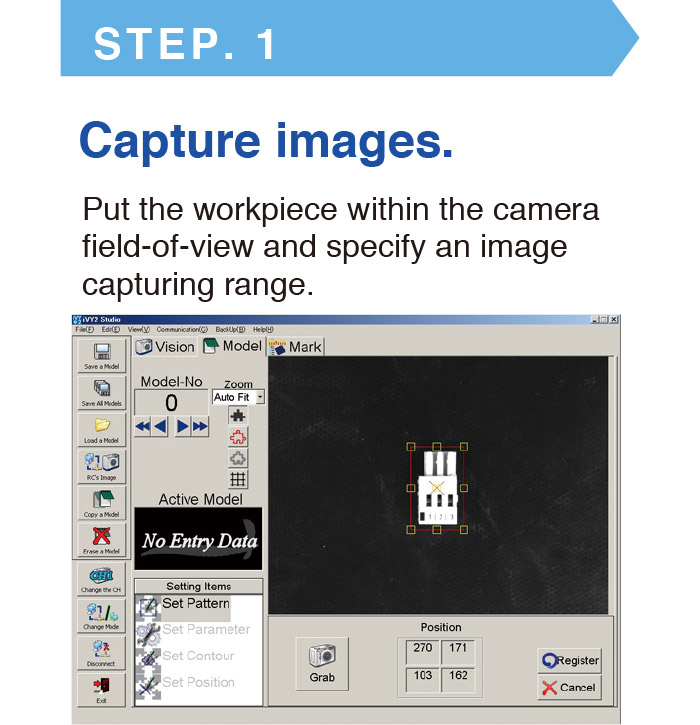
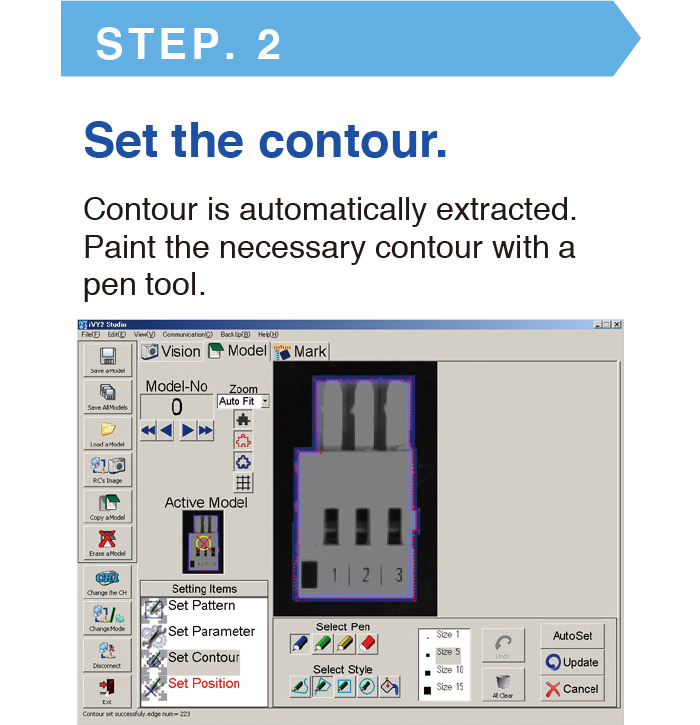
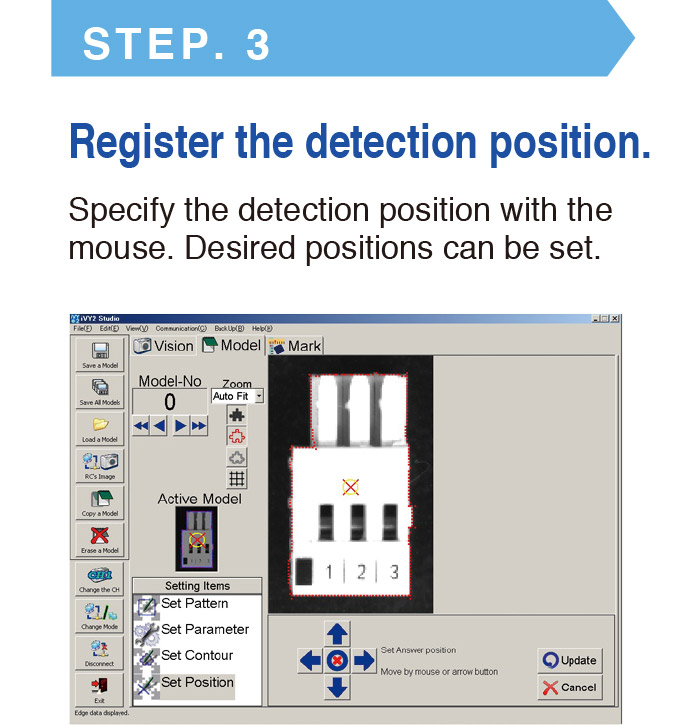
Reduced Start-up Line
1. 3 easy steps for parts registration
From image acquisition, registration takes just three steps.
 |
 |
 |
 |
2. Simple parts judgement process
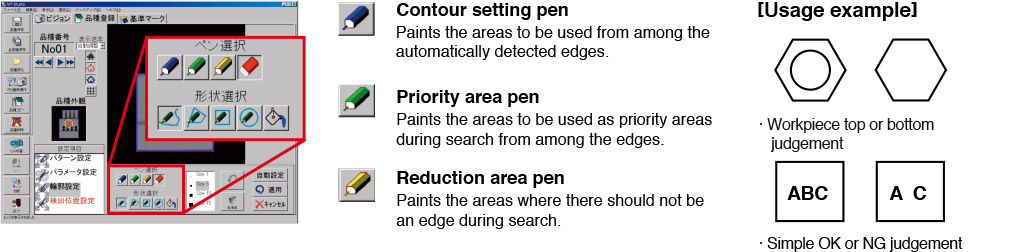
Usage example of contour setting pen
When a workpiece with a partially different shape needs to be distinguished and recognized or when the top or bottom needs to be judged, the detection can be performed by painting the contours in different colors by combining the contour setting pen with the priority area pen and reduction area pen.
 |
 |
The score may slightly vary depending on the presence status of the protrusion. However, both are detected. |
 |
 |
When no edge is detected in the area set as priority area, this is judged as NG and the workpiece is not detected. |
 |
 |
When an edge is detected in the area set as unnecessary area, the score is reduced and the workpiece is not detected. |
3. Simple calibration
| Conventional equipment combining "image processing unit + robot" requires many steps in "calibration" that aligns the camera coordinates with the robot coordinates. With the RCXiVY2+ system, following the wizard to perform the opera-tion will complete the calibration easily within a short time. In addition, even when the setting position deviates, the calibration is executed and restored immediately. |  |
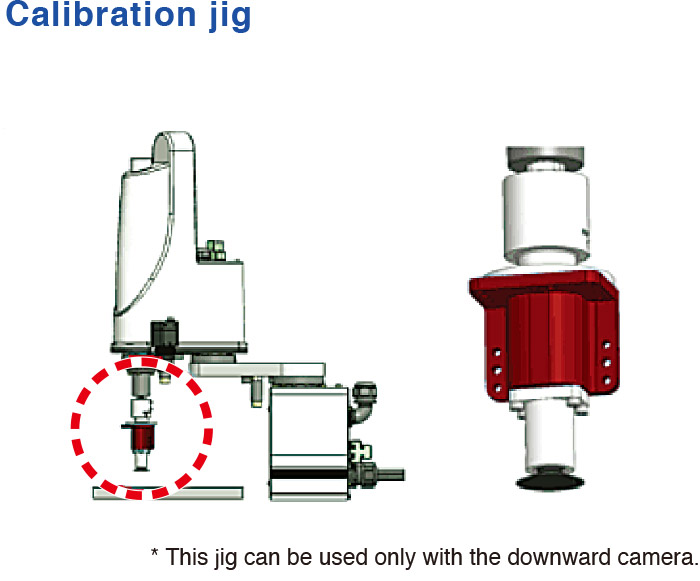
4. Calibration is automated with the dedicated jig.
By automating the calibration using the advanced calibration function, highly accurate calibration can be achieved easily without depending on the operator’s skill.
The hand data can also be created automatically and the time necessary for the calibration is reduced greatly. Since the dedicated jig is the standard part (option part), the jig does not need to be designed and manufactured and can be used immediately.
 |
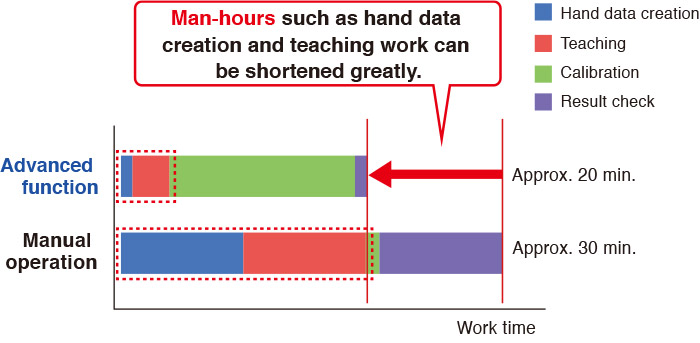 |
5. Setup time reduced greatly
When using third-party vision, a coordinate conversion program needs to be created in the robot controller since the robot coordinate data differs from the vision format.
In RCXiVY2+, vision system is incorporated in robot controller the robot coordinate data can be stored into the robot point data using single process. This ensures very simple operation. Additionally, the unified control of the camera control and light control can be performed using the robot program. Start-up process will be greatly simplified.
|
Comparison of setup time |
 |
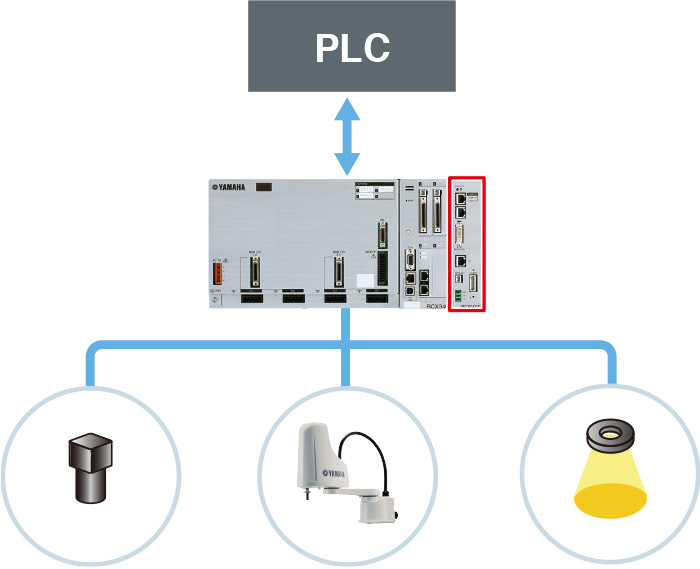
6. Easy link with peripheral equipment
One controller provides unified control of robot, gripper, and lighting.
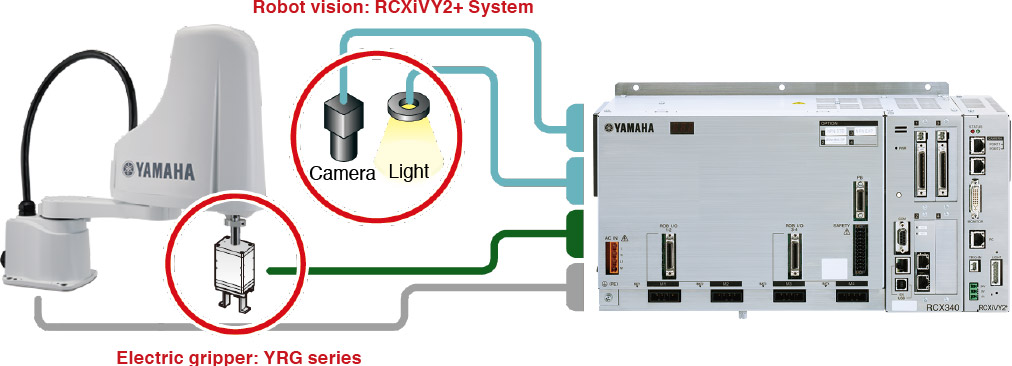
7. System configuration illustration
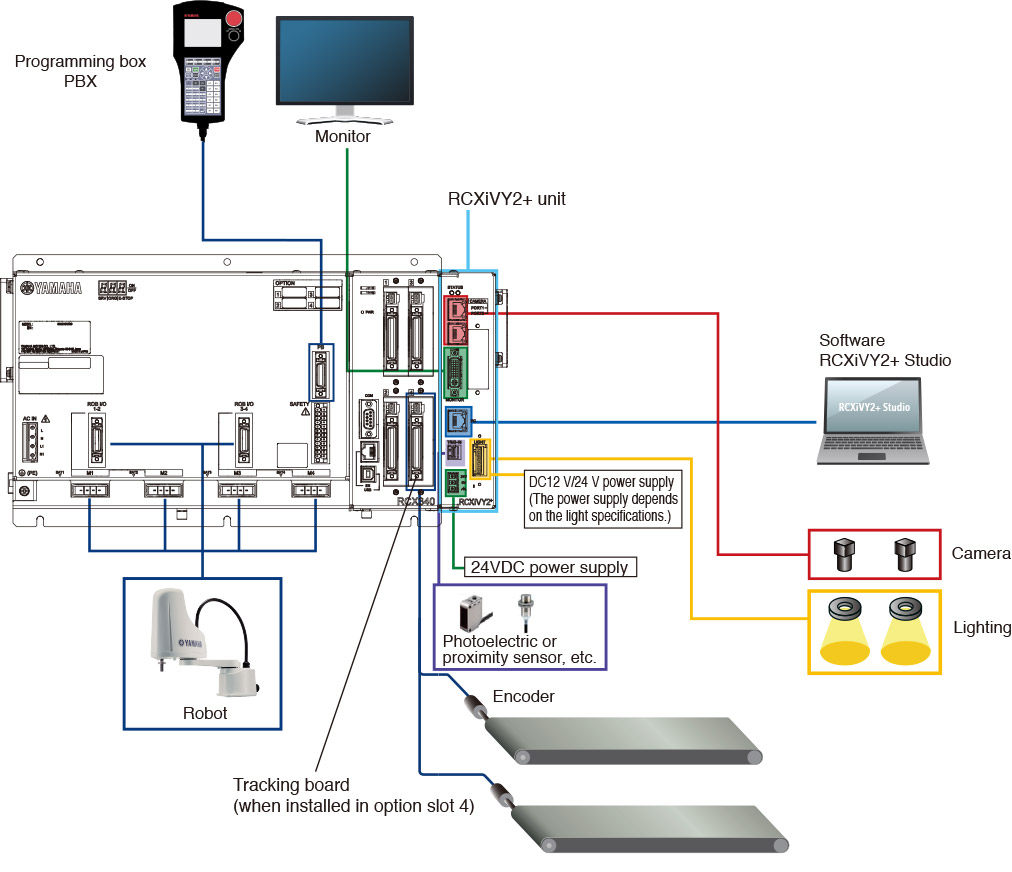
*Shows a system configuration example of the RCXiVY2+ unit (with light control board option).
*To the STD.DIO, ACIN, and SAFETY connectors not shown.
Usability
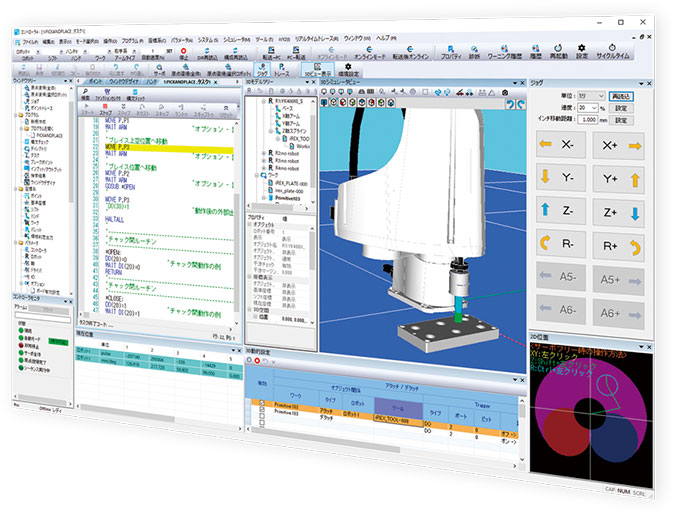
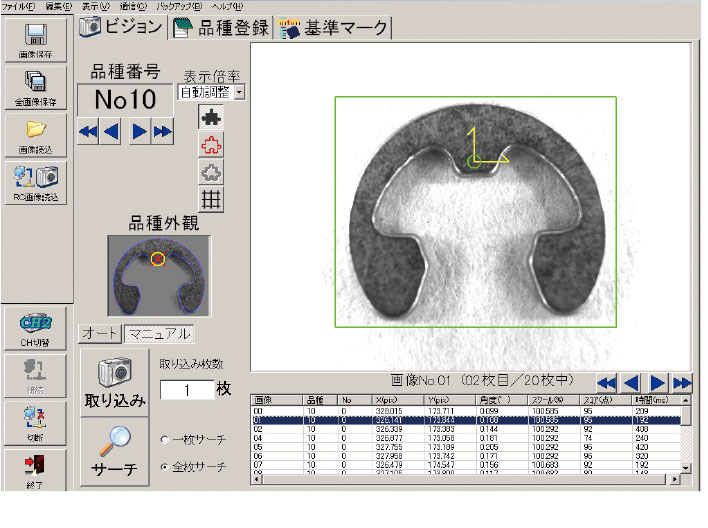
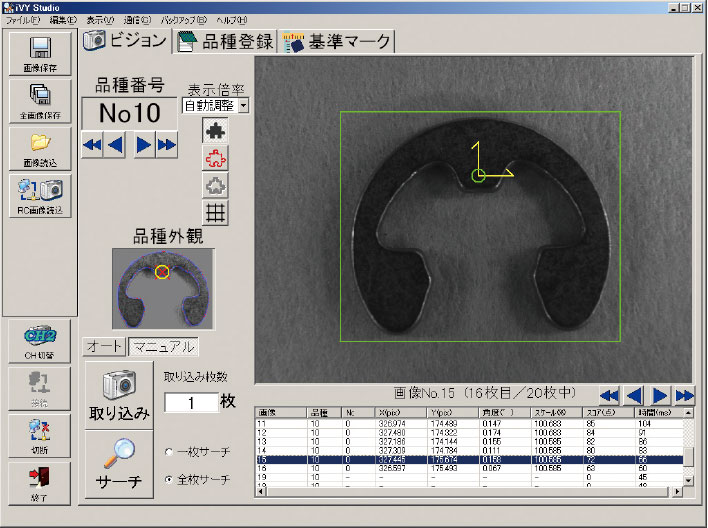
1. Easy-to-use programming software RCXiVY2+ Studio
With programming software “RCXiVY2+ Studio”, all vision related operations such as registration of fiducial marks and workpieces used for calibration (contour settings, various parameter settings, and read range settings), backup, restore operation, and operation monitor can be performed.
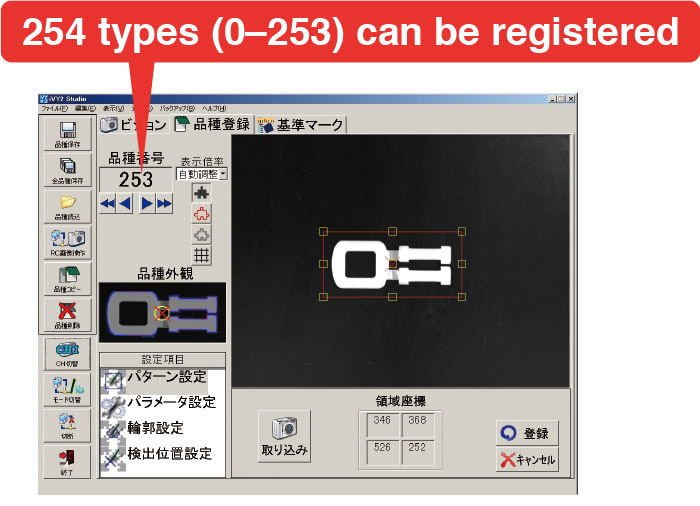
| -Search trial-run, part type registration -Reference mark registration (for calibration) -Up to 254 workpiece types can be registered. -Workpiece can also be added easily. -Up to 100 workpieces can be detected at once. -Data backup -This software functions as a monitor during program operation. |
 |
2. Easy programming
Constructing the most suitable robot vision system for an application.
RCX-Studio 2020 program template function
Program is created automatically simply following step-by-step operating process
RCX3 series programming software RCX-Studio 2020 also has following five templates for vision system:
-Pallet picking using the vision
-Dispensing work using the vision
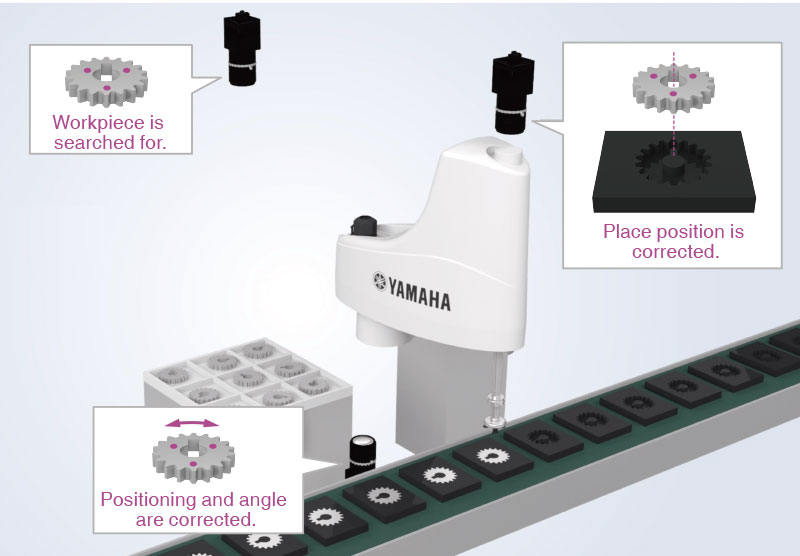
-Gripping deviation correction using the vision
-Gripping deviation and mounting position correction using the vision
-Gripping deviation and mounting position correction using the vision (without using any master)
 |
 |
 |
3. Wide variety of robot system to choose from most suitable and economical solution for robot vision system
|
XY-X Cartesian robots |
YK-XG/XE SCARA robots |
YK-TW orbit type robots |
FLIP-X single-axis robots |



4. Up to 254 types of parts registration
Setup changes require only that part numbers be changed. Setup changes are easy.
5. High-precision search even under low light
Edge search engine is built-in
Supports a variety of applications while being minimally affected by the external environment.
|
When lighting is sufficient |
Accurate search even if lighting is insufficient |
6. Monitor output
Monitor the operating status
Monitor the search status while making calibration settings or during automatic operation.
|
Contents of output Output method
|
 |
7. Lens distortion and camera inclination correction function
Mounting accuracy is improved. Camera is installed in the inclined status. ** Up to approx. 15 degrees
The lens distortion and camera inclination when the angle of visibil-ity is wide or when the camera is installed in the inclined status can be corrected. When the distortion and inclination correction function is enabled during calibration, the calibration data for the distortion and inclina-tion correction is created. When images are captured using this calibration data, captured images are corrected and output.
8. Also supports moving camera
Even if the camera is mounted on the robot, coordinates are automatically converted according to the robot's movement.
Camera position can be selected in accordance with the application.
 |
 |
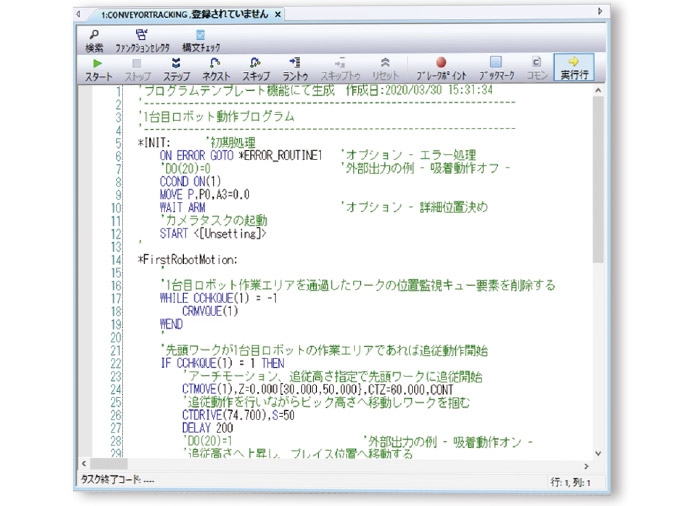
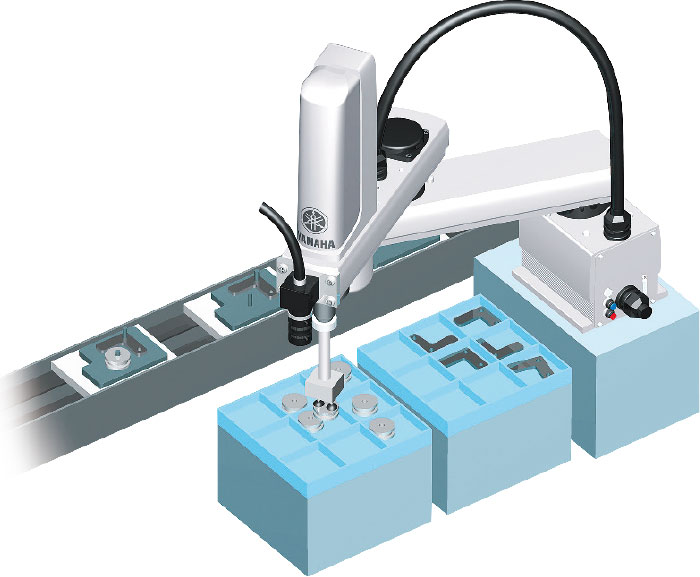
9. Conveyor tracking
Ideal for high-speed packaging arrangement high-speed transport of multiple types of items such as pharmaceuticals, cosmetics, and food products.
The vision camera detects the position and orientation of parts moving on the conveyor, and the robot picks them up.
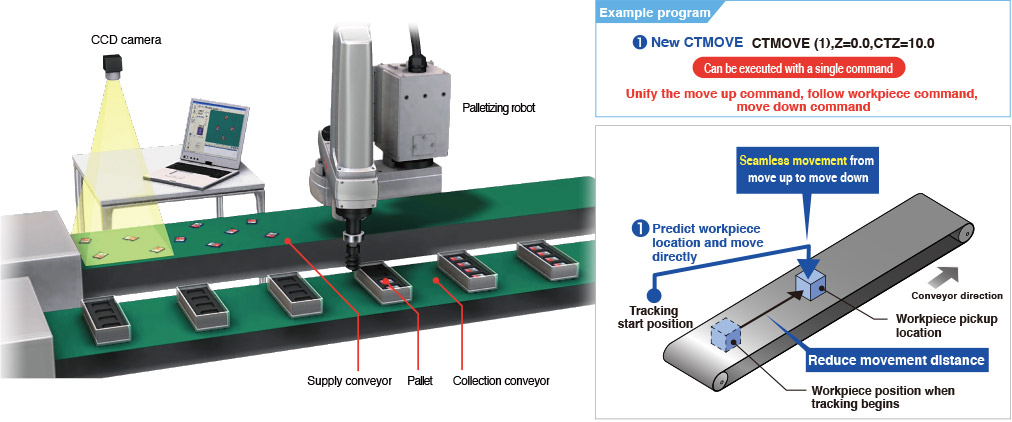
Operating conditions: YK500XG / payload 1 kg (total of workpiece and tool) / horizontal movement 250 mm / vertical movement 1 mm / conveyor speed 100 mm/sec
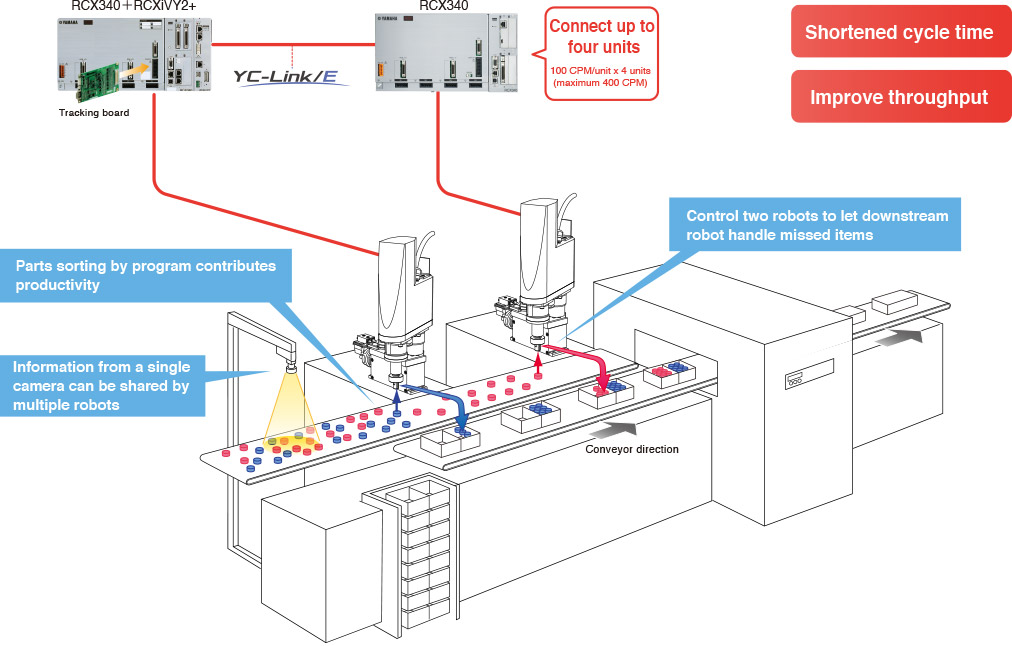
10. Improving productivity by controlling multiple robot systems
Support System
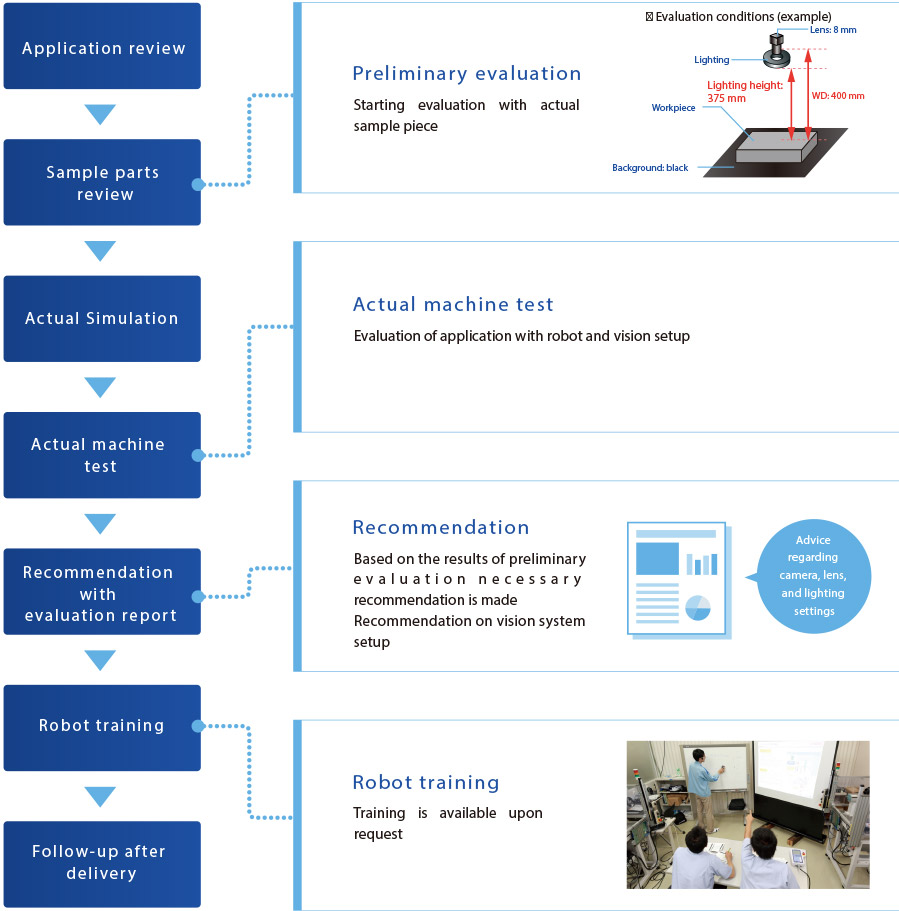
1. Verifying application prior to purchase
User’s application is verified using actual sample parts before making a purchase decision. Based on the evaluation result, recommendation will be made for most suitable and economical solution.
Specification
Basic specifications
| Robot vision basic specifications | ||
| Item | RCXiVY2+ unit | |
| Basic specifications | Applicable controllers | RCX340/RCX320 |
| Number of screen pixels | 728(H) × 544(V) (400,000 pixels) 1456(H) × 1088(V) (1,600,000 pixels) 2048(H) × 1536(V) (3,200,000 pixels) 2592(H) × 1944(V) (5,000,000 pixels)* |
|
| Model setting capacity | 254 models | |
| Number of connectable cameras | 2 cameras | |
| Connectable camera | GigE camera PoE: IEEE802.3af 1 ch up to 7W | |
| External interface | Ethernet (1000BASE-T)** USB 2.0 2Ch (Up to 5V 2.5W / ch)*** |
|
| External monitor output | DVI-I (*4) Monitor resolution: 1024 × 768 Vertical periodic frequency: 60 Hz Horizontal periodic frequency: 48.4 kHz |
|
| Power supply | 24 VDC +/-10%, Maximum 1.5 A | |
| Dimensions | W45 × H195 × D130 (RCXiVY2+ unit only) | |
| Weight | 0.8kg (RCXiVY2+ unit only, when the lighting control board option is selected) | |
| Operating environment | Compliant with the RCX340/RCX320 controller. | |
| Storage environment | Compliant with the RCX340/RCX320 controller. | |
| Search method | Edge search (correlated edge filter, sobel filter), Measurement function, Blob search | |
| Image capturing | Trigger mode | S/W trigger, H/W trigger |
| External trigger input | 2 points | |
| Function | Position detection, coordinate conversion, automatic point data generation, distortion and inclination correction | |
| Camera installation position | Fixed to the fixed camera (up, down) or robot (Y-axis, Z-axis). Perpendicular to the workpiece to be captured. |
|
| Setting support function | Calibration, image save function, model registration (*5), fiducial mark registration (*5), measurement function registration Note5, blob registration (*5), monitor function (*5) |
|
| Lighting control options | Number of connectable lighting units | Maximum 2 |
| Modulated light format | PWM modulated light control (0 to 100%), PWM frequency switchable 62.5 kHz/ 125 kHz Continuous light, strobe light (follows camera exposure) |
|
| Lighting output | 12VDC or 24VDC (external supply shared by both channels) | |
| Lighting output | For 12VDC supply: Total of less than 40W for both channels. For 24VDC supply: Total of less than 80W for both channels. |
|
*Since the rolling shutter is used, the tracking is not supported.
**For setting and monitor operations
***It is planned to support this USB later.
(*4) Also usable with an analog monitor by using a conversion adaptor.
(*5) RCXiVY2+ Studio function (requires a Windows PC)
| Tracking board basic Specifications | ||
| Item | Tracking board | |
| Basic specifi cations | Applicable controllers | RCX340/RCX320 |
| Number of connected encoders | Up to 2 units. | |
| Encoder power supply | 5VDC (2 counters total 500 mA or less) (Supplied from controller) | |
| Applicable encoder | 26LS31/26C31 or equivalent line driver (RS-422 compliance). | |
| Input phase | A, A, B, B, Z, Z | |
| Max. response frequency | 2MHz or less | |
| Counter | 0 to 65535 | |
| Multiplier | 4x | |
| Other | With disconnection detection function | |
External View
|
RCX340 + RCXiVY2+
|
RCX320 + RCXiVY2+
|
Ordering method
Catalog
-RCXiVY2+ Catalog (4.0 MB)



