




2-axis comprehensive controller RCX320
Then newest addition to RCX3 series.
 |
RCX320 1 to 2 axis controller -Controllable robot:XY-X・FLIP-X・PHASER・YP-X |
Feature
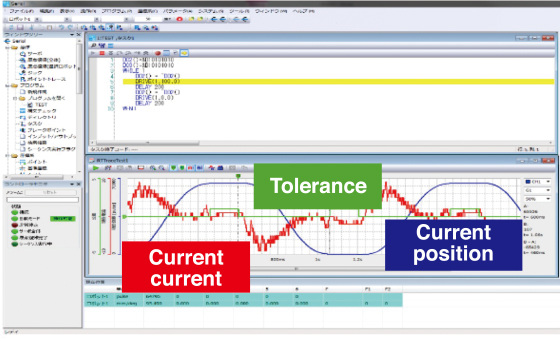
Real-Time output function for Preventive Maintenance.
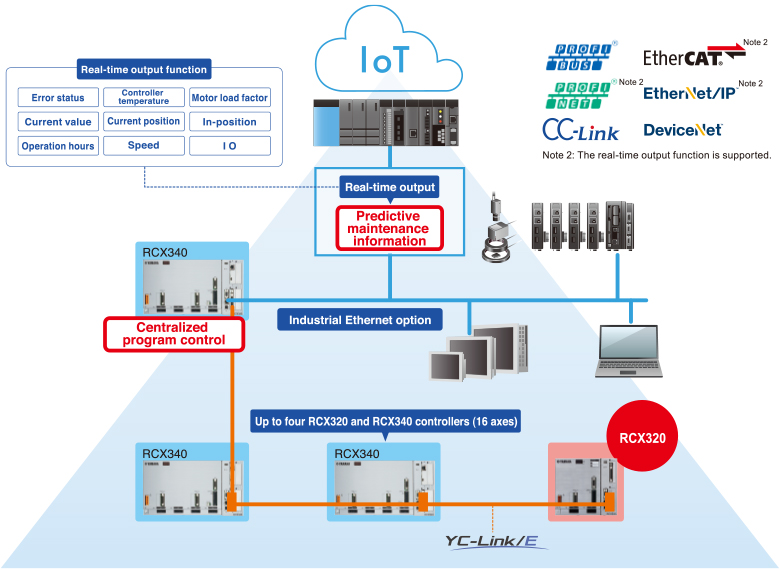
1. Industrial Ethernet option Real-Time output function*
When the industrial Ethernet option (Ethernet/IP, EtherCAT, or Profinet) is selected, the information necessary for the predictive maintenance such as error status, current position, current value, motor load factor, operation hours, and others can be output in real-time to contribute to achievement of the "non-stop production line".
*The 4-axis controller "RCX340" also supports this function.
Easy and user-friendly operation system
2. Economical solution for 6 axes robot setup.
By connecting RCX340 4-axis controller through YC Link/E, total of 6 robots can be operated.
3. PBX with USB port for backup.
Simple and easy operation for adding function or editing work. Storing backup data is a simple task.

4. The CPU processing capacity is increased approx. three times.
The CPU processing capacity is approximately three times faster than that of the conventional model RCX221/222. The control performance such as operation tracking or internal process time is improved greatly.
5. Convenient LED Display for Error Status.
The operation status is displayed on the "7-segment LED display" located on the front panel of the controller. If an error occurs, the relevant error message is displayed. The error status can visibly recognized without connecting the programming box.

7-segment LED display
6. RCX320 supports all 2-axis robots from small to large.
RCX320 is designed to operate Yamaha’s all 2-axis robot systems with AC servo motor or linear motor. Controls two Flip/Phaser axes or all XY 2-axis systems.
7. Ideal for dual synchronized robot systems.
The dual robot that performs the synchronous drive between two axes can be easily controlled by one RCX320 controller.
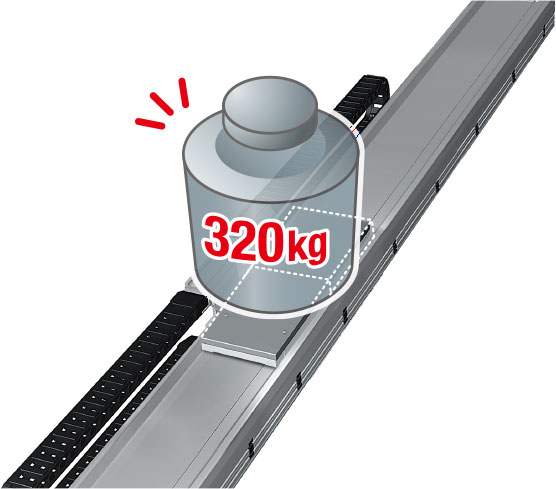
8. Up to 320 kg can be controlled by one RCX320 controller.
If two sliders of Phaser dual system are connected and synchronized, its total payload capacity will become 320 kg (MF75D system).
9. PC Programming Software “RCX-Studio Pro”(Common to the RCX340)
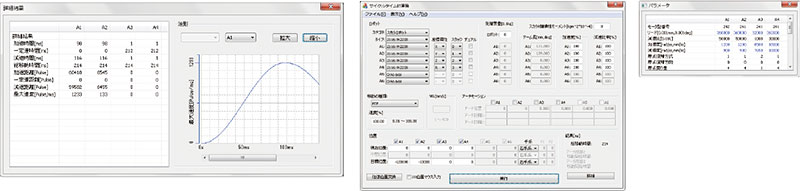
Both RCX340 and RCX320 run with RCX-Studio Pro. With an emulator function, writing programs or debugging can be done without connecting a controller.
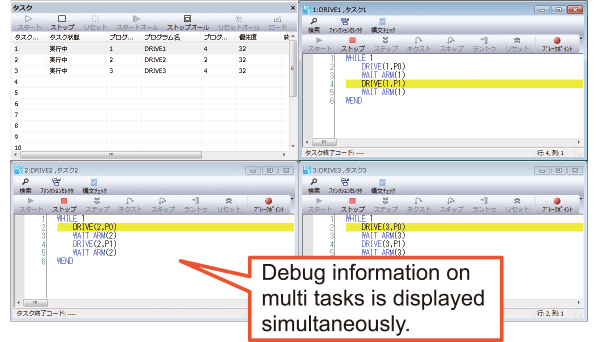
Cycle time calculator between two points simplified a selection of the most suitable robot system. After startup, real-time trace and multi-tasking debug information is displayed simultaneously for monitoring status.
|
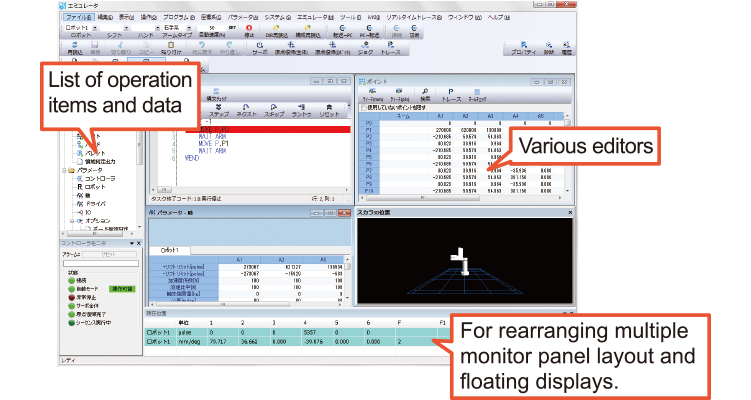
Robot operations like initial setup and maintenance tasks are easier than ever. Model Selection Stage Reduces evaluation time before design stage.
Design Stage Reduced design workload Easy-to-use operating controls
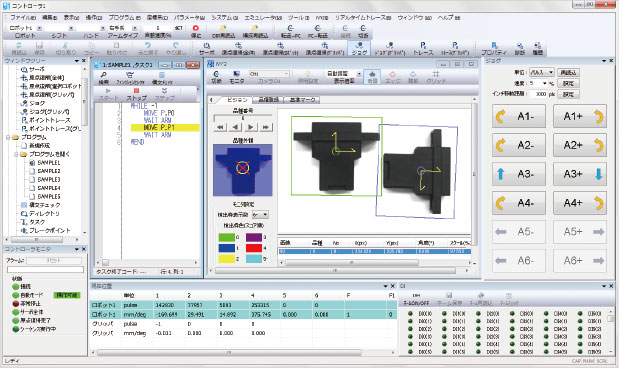
iVY2 editor provided The component type can be registered without changing the software when the robot vision is used.
Startup and Operation Stage Visualized information for easy monitoring. Realtime trace
Application debugging function
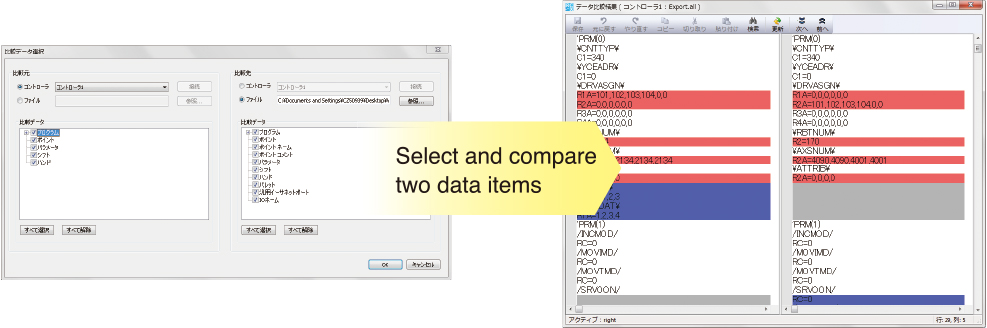
MaintenanceThe maintenance and service time is reduced greatly. Data comparison tool
|
More enhanced expandability
10. Enhanced field network support and option function
Six types of internal field networks such as EtherNet/IP, EtherCAT, CC-Link, DeviceNet, PROFINET, and PROFIBUS are supported. The RS-232C and Ethernet ports are installed as the standard ports and the option functions such as the gripper and vision system are also supported, allowing you to construct a system suitable for the needs.

11. Synchronized control of multi-axis robots
Use of the inter-controller communication "YC-Link/E" makes it possible to control multiple robots such as Cartesian robots and SCARA robots synchronously. The YC-Link/E can be executed by the program of only the master controller. This contributes to great reduction of the system startup time. The "RCX320" and "RCX340" controllers support both the master and slave specifications, allowing you to construct a system flexibly. Note. Up to four "RCX320" and "RCX340" controllers can be connected by the inter-controller communication "YC-Link/E".
Improvement of basic performance
The basic performance is greatly improved when compared to the conventional "RCX221/222" controllers.
Specifications
| Basic specifications | ||||
| Applicable robots | YAMAHA single-axis robots, linear single-axis robots, P&P robots | |||
| Connected motor capacity | 1200W or less (in total for 2 axes) | |||
| Power capacity | 2400VA | |||
| Dimensions | W213 × H195 × D130mm (main unit only) | |||
| Weight | 3.6kg (main unit only) | |||
| Input power supply | Control power supply | Single-phase 200 to 230V AC +/-10% 50/60Hz | ||
| Main power supply | Single-phase 200 to 230V AC +/-10% 50/60Hz | |||
| Axis control | ||||
| No. of controllable axes | Max. 2 axes Up to four units of the RCX320 and RCX340 can be connected using the inter-controller communication “YC-Link/E”. |
|||
| Drive method | AC full digital servo | |||
| Position detection method | Resolver or magnetic linear scale | |||
| Control method | PTP motion (point to point), ARCH motion, linear interpolation, circular interpolation | |||
| Programming | ||||
| Program language | YAMAHA BASIC II conforming to JIS B8439 (SLIM language) | |||
| Multi-task | Max. 16 tasks | |||
| Sequence program | 1 program | |||
| Memory capacity | 2.1MB (Total of program and point data) (Available capacity for program when the maximum number of points is used: 300KB) |
|||
| Program | 100 programs (maximum number of programs) 9999 lines (maximum number of lines per program) |
|||
| Point | 30000 points (maximum number of points) | |||
| Point teaching method | MDI (coordinate data input), direct teaching, teaching playback, offline teaching (data input from external unit) | |||
| External I/O | ||||
| SAFETY | Input | Emergency stop ready input, 2 systems Auto mode input, 2 systems (Enabled only when the global specifications are used.) |
||
| Output | Emergency stop contact output, 2 systems Enable contact output, 2 systems (Enabled only when the PBX-E is used.) Motor power ready output, 2 systems |
|||
| Brake output | Transistor output (PNP open collector) | |||
| External communications | RS-232C: | 1CH (D-SUB 9-pin (female)) | ||
| Ethernet: | 1CH (In conformity with IEEE802.3u/IEEE802.3) 100Mbps/10Mbps (100BASE-TX/10BASE-T) Applicable to Auto Negotiation |
|||
| RS-422: | 1CH (Dedicated to PBX) | |||
| Options | ||||
| Parallel I/O board | Standard specifications | Dedicated input 8 points, dedicated output 9 points General-purpose input 16 points, general-purpose output 8 points NPN/PNP specifications are selected. (maximum 1 board) |
||
| Expansion specifications | General-purpose input 24 points, general-purpose output 16 points NPN/PNP specifications are selected. (maximum 4 boards) |
|||
| CC-Link board Ver1.1/2.0 | Remote I/O | Dedicated input/output: 16 points each General-purpose input/output: 96 points each |
||
| DeviceNet™ board | ||||
| EtherNet/IP™ board | ||||
| PROFIBUS board | Remote register | Input/output: 16 words each | ||
| PROFINET board | ||||
| EtherCAT board | ||||
| YC-Link/E board (master/slave) | Communication cycle: 1 ms, control cycle: minimum 1 ms / maximum 8 ms, maximum number of robot units: four units Maximum number of control axes: total 14 axes (including two master controller axes), maximum 12 axes for slaves only |
|||
| YRG (gripper) board | Position detection method: optical rotary encoder, minimum setting distance: 0.01 mm Speed setting: 20 to 100% relative to the maximum parameter speed, number of connected gripper units: maximum two units Drive power: DC 24V +/-10%, 1.0A Max |
|||
| Tracking board | Number of connected encoders: maximum two units, supported encoders: 26LS31/26C31 equivalent line driver (RS422 compliant) Encoder power supply: DC5V (2 counter (ch) total 500 mA or less) (supplied from controller) |
|||
| iVY2 unit | Camera pixels: maximum 5 million pixels, number of registered models: 254 models, number of connected cameras:maximum two units Power supply: DC24V +/-10% 1.5A Max |
|||
| Programming box | PBX, PBX-E | |||
| Absolute battery | 3.6V 2750mAH / axis Backup retention time: About 1 year | |||
| Support software for personal computer | RCX-Studio Pro | |||
Catalog
-RCX320 New product information (1.7 MB)
-RCX320 Catalog (1.6 MB)



